 Arduino 기울기 센서 ADXL345의 활용
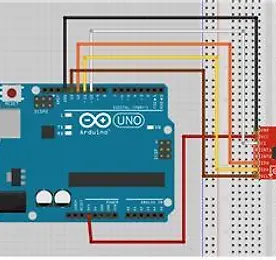
아두이노에서 ADXL345 3축 기울기센서를 이용해 기울기를 알아내는 방법을 알아보자. 기울기센서는 크게 분류해서 2종류로 나눌 수 있다. 3축 기울기 정보 x, y, z를 따로따로 받는 센서 SDO, SDA, SDL을 이용해 하나의 정보로 받는 센서 x, y, z 축의 정보를 따로따로 받는 센서는 센서의 연결부분에 x, y, z라고 명시적으로 표현되어 있다. 대표적으로 ADXL335가 있는데, 이 센서가 ADXL345보다 쓰기 편해서 인터넷에서 찾을 수 있는 기울기 센서 관련 많은 문서들이 이 기울기 센서를 사용하고 있다. 반면 SDO, SDA, SDL을 사용하는 센서는 위의 센서보다 훨씬 빠른 속도로 기울기를 측정할 수 있는 장점이 있으나, 비교적 사용이 어려운 점이 있다. ADXL345는 3축의 정..
더보기
Arduino 기울기 센서 ADXL345의 활용
아두이노에서 ADXL345 3축 기울기센서를 이용해 기울기를 알아내는 방법을 알아보자. 기울기센서는 크게 분류해서 2종류로 나눌 수 있다. 3축 기울기 정보 x, y, z를 따로따로 받는 센서 SDO, SDA, SDL을 이용해 하나의 정보로 받는 센서 x, y, z 축의 정보를 따로따로 받는 센서는 센서의 연결부분에 x, y, z라고 명시적으로 표현되어 있다. 대표적으로 ADXL335가 있는데, 이 센서가 ADXL345보다 쓰기 편해서 인터넷에서 찾을 수 있는 기울기 센서 관련 많은 문서들이 이 기울기 센서를 사용하고 있다. 반면 SDO, SDA, SDL을 사용하는 센서는 위의 센서보다 훨씬 빠른 속도로 기울기를 측정할 수 있는 장점이 있으나, 비교적 사용이 어려운 점이 있다. ADXL345는 3축의 정..
더보기







